
www.auto-innovations.net
01
'22
Written on Modified on
Vector News
Integration of Massive Virtual Test Drives Into DevOps Workflows With DYNA4 Release
Vector introduces Release 7 of DYNA4. The new release fosters the adaption of DevOps workflows in modern vehicle control software development. With its capabilities to generate lightweight simulation packages for Linux environments, massive simulations of virtual test drives can be integrated easily into continuous testing (CT) pipelines.
DevOps workflows and continuous software testing are indispensable for the development of modern vehicle control software. The adoption of these methods helps significantly to meet the requirements on quality and functional safety of automotive software. The simulation tool DYNA4 supports customers throughout the entire development cycle with virtual test drives – from model-based control design to hardware-in-the-loop ECU testing. The new DYNA4 Release 7 introduces features that facilitate the adaption of virtual test drives in continuous testing pipelines.
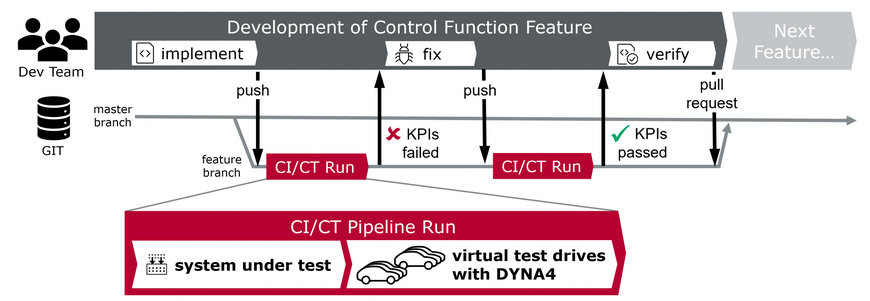
The DYNA4 vehicle and scenario simulation models are based on freely customizable models in Simulink. From these models, lightweight simulation packages can be generated for Windows or Linux. For instance, they can be exported to FMUs or they can be distributed and operated as Docker containers. Both, the generation, and the execution of these DYNA4 Run Packages can be automated for CT pipelines. This could be triggered by a pull request of a control function software developer or of a test engineer who extended the ADAS test scenario catalog. As a result, scaled execution for massive simulations of millions of virtual test drive kilometers can be realized easily, for example using a Kubernetes cluster.
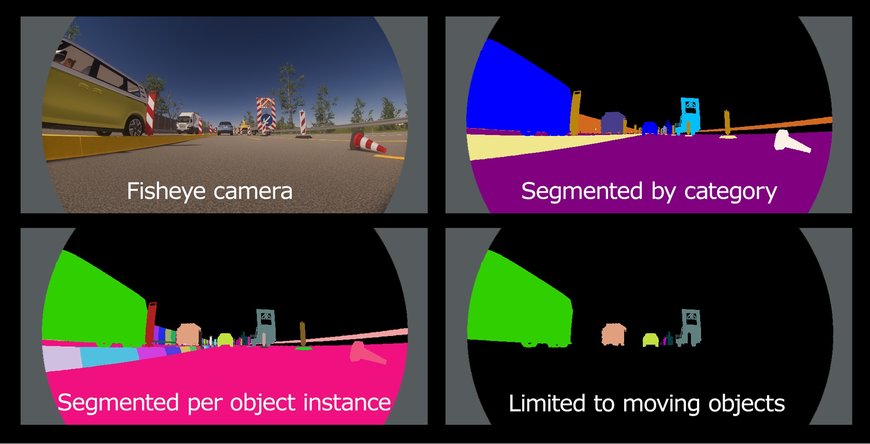
Image segmentation of smart camera sensor based on object instances or customizable categories.
Smart Camera Model and Comprehensive Ground Truth
The perception of the environment is key for realizing ADAS/AD functions. Therefore, it is an essential model part of modern simulation tools for virtual test driving. Depending on the system boundaries of the ADAS/AD function under test, an appropriate level of abstraction must be chosen for the sensor model, ranging from idealized object lists to raw sensor output. DYNA4 R7 closes a gap at the intermediate detection-level of camera sensors: the segmented image as an output of a smart camera sensor can now be fully customized.
Various distortion filters can be parameterized, and the segmentation can be either based on single object instances or on object categories. The latter can be adjusted to match the relevant categories and even the respective colors which are output by the real smart camera sensor. Further improvements concern the provision of ground truth data as a key asset of simulation. With DYNA4 R7 all visualized objects can be extracted in compliance with the ASAM OSI standard, which emphasizes DYNA4’s high integrability.
Three DYNA4 Product Editions
DYNA4 R7 introduces three product editions which are tailored to suit different use cases and operation environments and as such ideally supports modern DevOps workflows.
The “Server Edition” mentioned above provides features that foster the fully automated and scaled execution of virtual test drives in continuous testing pipelines. The “Desktop Edition” is designed for simulation experts who focus on simulation content authoring, perform individual simulation studies, or prepare automated operations of test benches and massive simulations. The “Test Bench Edition” is best suited for manual and automated operation of dedicated SIL or HIL test benches.
More information at: www.vector.com/dyna4
www.vector.com
